El 2019 ha empezado fuerte. El pasado 4 de febrero, dimos un taller de drones en el Colegio Padre Claret de Segovia aprovechando su Semana de la Ciencia.
Nuestro compañero Juan Carlos se desplazó hasta allí para pasar la mañana con los alumnos de primero y segundo de la ESO.

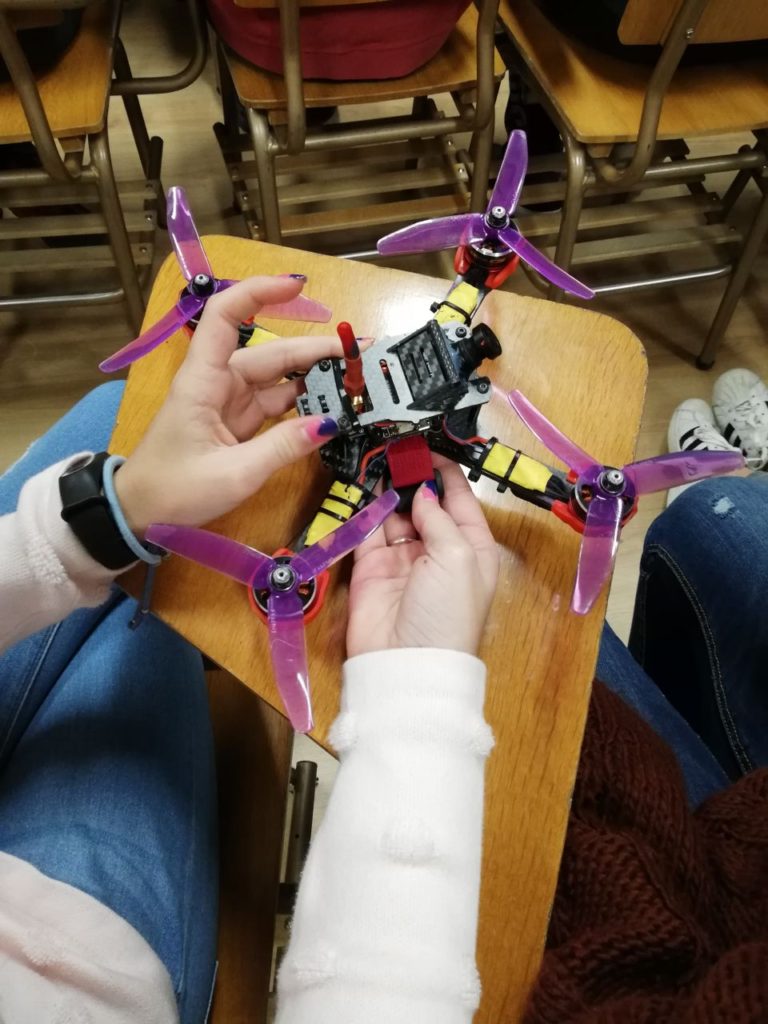
En primer lugar, se explicó qué es un dron, de qué partes está formado y sus aplicaciones más comunes. Tras esta introducción «teórica», comenzó la diversión.
Se visualizaron varios vídeos para que los alumnos pudieran ver tanto la parte más profesional (grabación de vídeo profesional) como la parte más informal del vuelo con drones (vuelo freestyle). Los alumnos quedaron asombrados con las piruetas de nuestro amigo Juanma.
Y llegó el momento de la demostración en vivo.
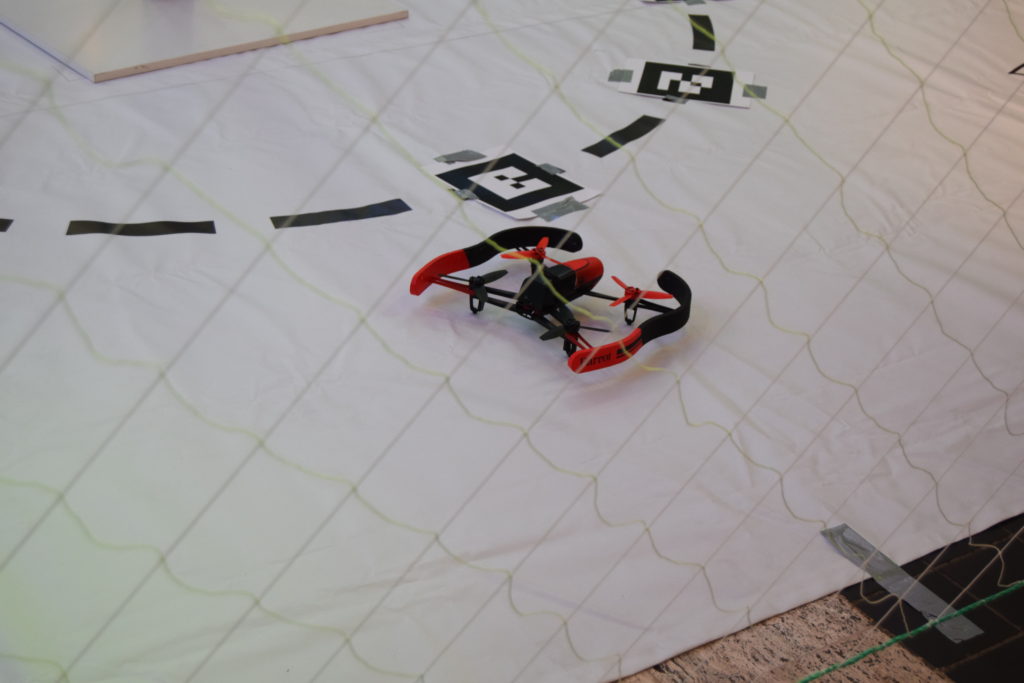
Se utilizó un Mavic Air para enseñar a los alumnos los princípios básicos de vuelo, los sensores de seguridad y los mecanismos de posicionamiento del dron. Los alumnos pudieron disfrutar también de una demostración de control del dron mediante gestos, la cual sorprendió incluso a los profesores asistentes.
Los alumnos parecían muy interesados en el tema normativo de estos aparatos, en los lugares donde se puede volar, en los que no, en los permisos necesarios para ello….

Y para finalizar el taller, se mostraron las capacidades de estas máquinas controladas por ordenador mediante Scratch. En este caso, se utilizó un Rize Tello.