





Aquí os presentamos el primer robot velocista desarrollado tanto el hardware como el software completamente por Acylbot.
Toda historia tiene un comienzo y esta se inicia cuando los socios nos juntamos para desarrollar nuestro primer proyecto denominado Reborn. Todos veníamos con experiencias de anteriores robots pero queríamos un proyecto conjunto y con prestaciones nuevas. Esperamos que disfrutéis de esta entrada y os anime a más de uno a trabajar con ello.
PASO 1: Definición de las especificaciones del robot.
Para empezar el diseño de un robot nos tuvimos que reunir para dejar claras cuales iban a ser las especificaciones que cada cual quería en el robot. Se pusieron todas en común si se obtuvo lo siguiente:
- Control procedente de un microcontrolador de la familia Microchip© dsPIC, en concreto el dsPIC 30F4011-30I/PT.
- Memoria EEPROM de la familia ON Semiconductor© concretamente la CAT24C128, para almacenamiento de parámetros.
- Control de nivel de batería para poder avisar de cuando toca cambiar las baterías. Este control será muy útil durante las competiciones, sino que se lo digan al nuestro compañero.
- Conector para un módulo Bluetooth que servirá para depurar la programación.
- Conector para dispositivo IMU que combina sensores inerciales y cuya comunicación se realiza mediante el protocolo I2C. Este dispositivo se puede adquirir en el distribuidor Pololu©.
- Etapa de potencia para motores de la familia Microchip© MCP14E4-E/SN.
- 2 baterías LIPO nano-tech de 300mAh de una celda (3.7V), total de 7.4V.
- Para los motores se utilizarán unos DC/DC Step-Up 9V del distribuidor Pololu©.
- Para la tensión de control se utiliza un DC/DC Step-Up/Step-Down 5V de Pololu©.
- Motores 10:1 HP de Eje Extendido de Pololu©.
- Pareja de encoders para el eje extendido de los motores de Pololu©.
Otras especificaciones básicas del robot:
- 1 interruptor para encender y apagar el robot.
- 2 pulsadores para la configuración de programa.
- 1 pulsador de reseteo de programa.
- 3 luces (leds) para control de programa y depuración.
- 2 leds más en la parte inferior del diseño, una para cada lado de los motores.
- 8 sensores QRE1113GR para el seguimiento de las líneas.
Una especificación en la que se chocaba un poco era en el tamaño del robot. Puesto que había gente que quería una medida fija, otros defendían la idea de un mástil flexible, por lo que el equipo de diseño, añadió dos conectores para poner un cable flexible, aunque la fabricación se realiza sobre un tamaño fijo con un mástil rígido. Finalmente el tamaño que se elige para el robot es de 100x150mm
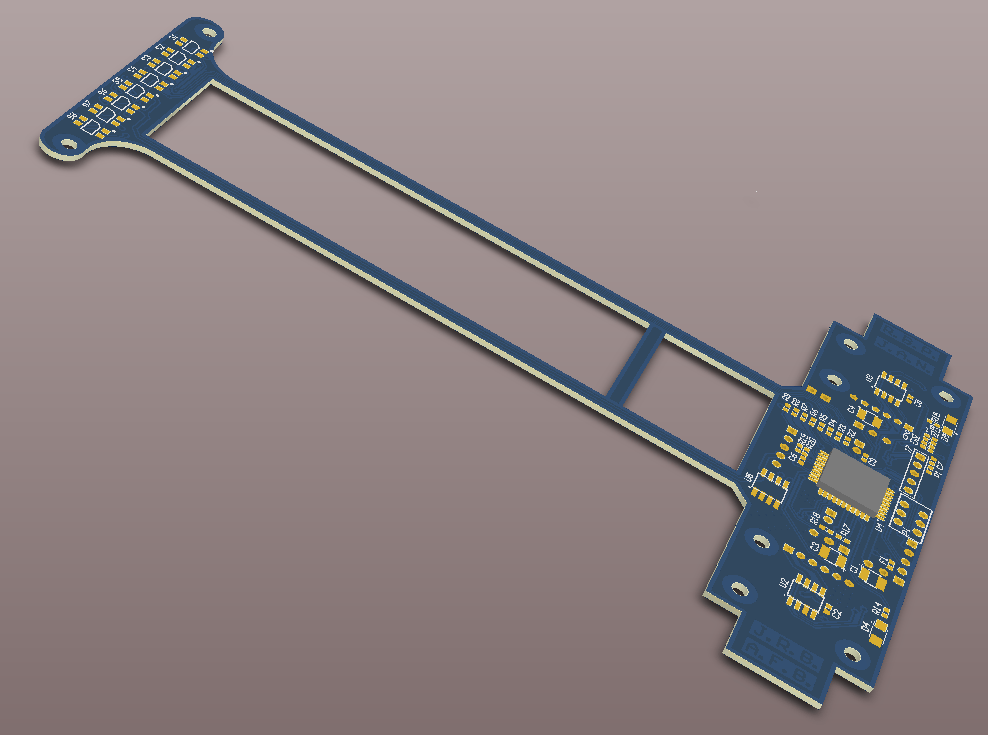
PASO 2: Diseño de Reborn.
Una vez definidas todas las características, el equipo de hardware dispuso el esquema electrónico para su desarrollo y finalmente se consiguió este resultado. El peso de este diseño en PCB es solamente de 9 gramos.
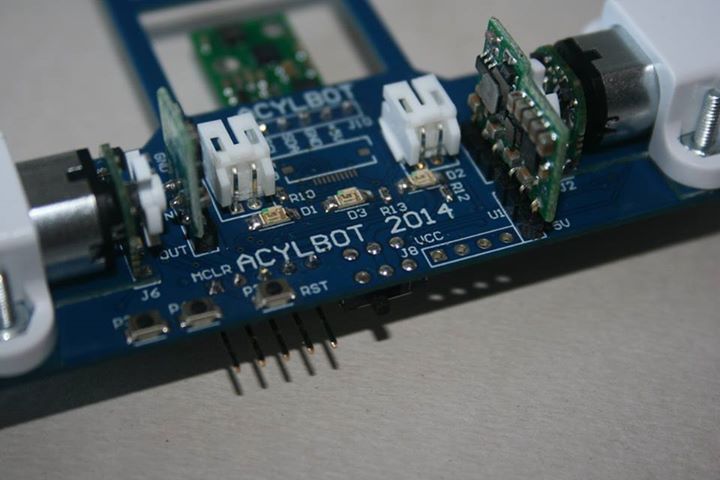
PASO 3: Montaje de Reborn.
Finalizado el diseño y una vez recibido el material para poder montar el robot, se procedió a su montaje y ya está listo para correr. El peso máximo del robot que hemos alcanzado es de 67 gramos, pero depende del montaje final ya que puede ir con mastil de FR4 o un mastil casero.
Si estás interesado en adquirir uno, ponte en contacto con nosotros desde aquí.
Pingback: ROBOLID 2017 | AcylBot
Pingback: ARROYO DE LA ENCOMIENDA 2017 | AcylBot
Pingback: ROBOLID 2018 | AcylBot