





Algunos compañeros de la asociación llevamos ya varios años colaborando en Valladolid con la Asociación de Altas Capacidades de Castilla y León ACYLAC, dando un taller de robótica anual (inicialmente como miembros de AMUVa)
Pero este año, ya como Acylbot y como progresión de los talleres de robótica nos planteamos antes de los talleres desarrollar unos robots que fueran económicos para que los más pequeños y no tan pequeños disfruten programando y compitiendo. De esta idea han nacido nuestros dos nuevos robots: Dioduino y Turtleduino.
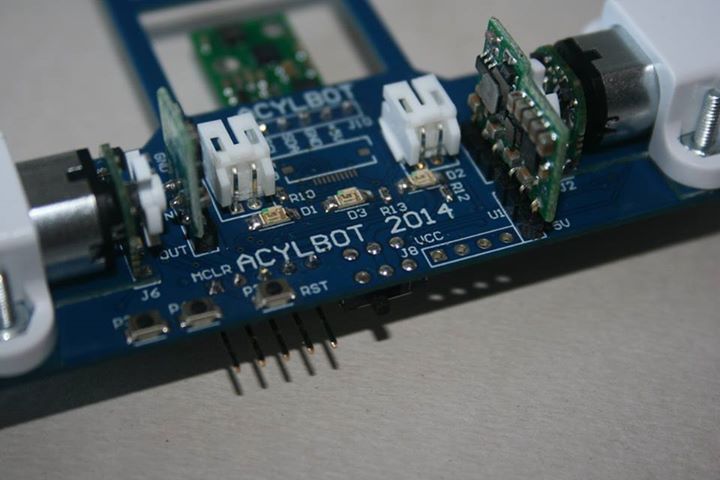
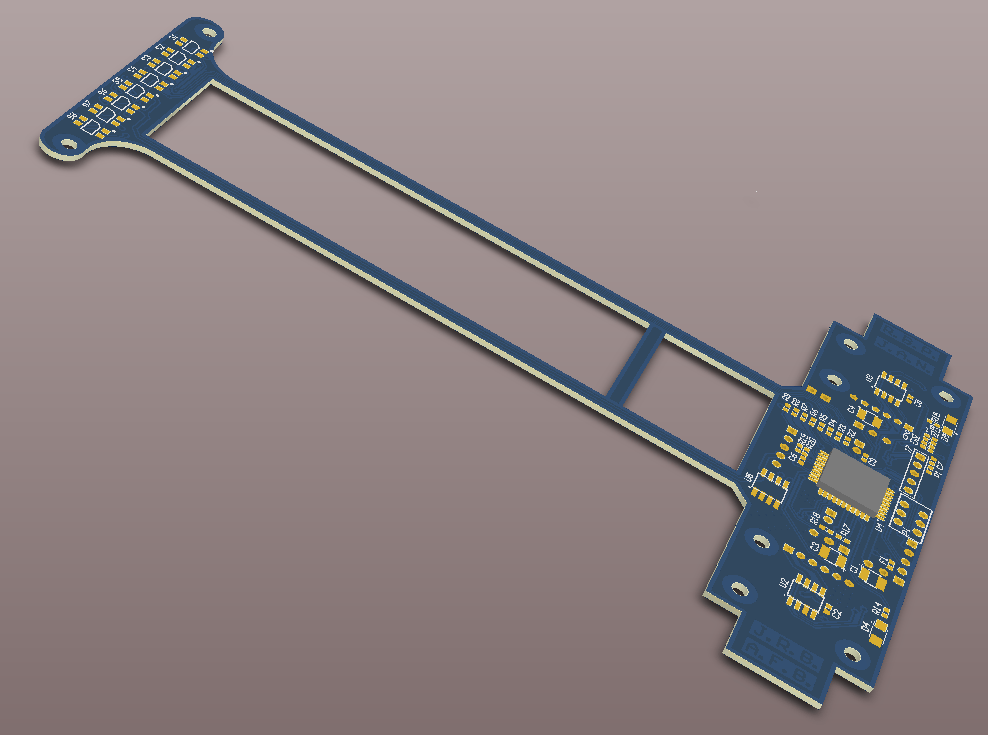
 Para los más mayores del taller que ya tienen nociones de Arduino hemos desarrollado un robot apto para iniciarse en la competición bien como rastreador o como velocista. El proyecto se bautizó como Dioduino por su forma de diodo y por basarse directamente un una placa arduino pro mini. Las características básicas que tiene son:
Para los más mayores del taller que ya tienen nociones de Arduino hemos desarrollado un robot apto para iniciarse en la competición bien como rastreador o como velocista. El proyecto se bautizó como Dioduino por su forma de diodo y por basarse directamente un una placa arduino pro mini. Las características básicas que tiene son:
- Alimentación con dos baterías Li-Po de 1 Celda/300mAh
- Programación directa con un cable micro-USB
- 8 sensores en la parte delantera para seguir las líneas
- Motores con reductora 30:1 con posibilidad de añadir un encoder para control de la velocidad.
- Un par de pulsadores y un par de leds para control de programación.
- Control del nivel de batería para evitar problemas con las baterías Li-Po
Estamos preparando el artículo del desarrollo del proyecto, junto con el desarrollo de las librerías para arduino© para que los expertos y no tan expertos en la materia puedan programar el robot si lo desean.
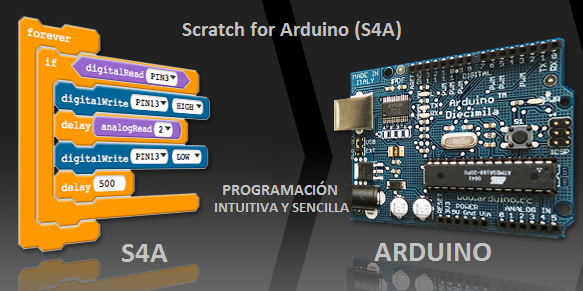
Para los más pequeños y sobre todo para los no iniciados en la programación y la robótica, hemos creado a Turtleduino, un robot con forma de tortuga que está adaptada como una shield para arduino. El proyecto se ha basándo en el proyecto Scratch for Arduino (S4A) que ha servido de punto de partida para desarrollar un robot que responda directamente a la comunicación con Scratch.
 Pero no sólo sirve para programar con Scratch. Si ya se sabe programar en arduino© puedes programar tú directamente la tortura o con las librerías que estamos desarrollando y que pronto estarán disponibles para descargar. Las características básicas que tiene son:
Pero no sólo sirve para programar con Scratch. Si ya se sabe programar en arduino© puedes programar tú directamente la tortura o con las librerías que estamos desarrollando y que pronto estarán disponibles para descargar. Las características básicas que tiene son:
- Alimentación con una batería Li-Po de 1 Celda/600mAh
- Programación directamente sobre la Arduino Uno o Duemilanove que tenga.
- 2 sensores para programar un sigue-líneas
- 1 sensor de luz (LDR) para proyectos de luminiscencia.
- 1 sensor de temperatura (LM35)
- 2 sensores de proximidad de 4cm a 30cm para evitar obstáculos.
- 1 zumbador para que suene (esta parte les encanta a los chicos)
- 2 pulsadores para diferentes proyectos
- 3 leds configurados como un semáforo además de luces traseras y delanteras.
- 2 servos de giro continuo con las ruedas para que se mueva la tortuga.
La idea de desarrollo ha sido imitar en parte lo que es un robot Moway© pero con arduino.
Para trabajar con arduino directamente de forma independiente, se ha añadido la batería Li-Po que proporciona la alimentación y que lleva incorporada un cargador en la placa, de forma que cargue con un micro-USB.
Los talleres se han realizo el pasado mes de marzo y han sido un éxito (o eso creemos) por lo que esperamos que les haya gustado la experiencia y sobre todo nuestros robots.

{kind=link}